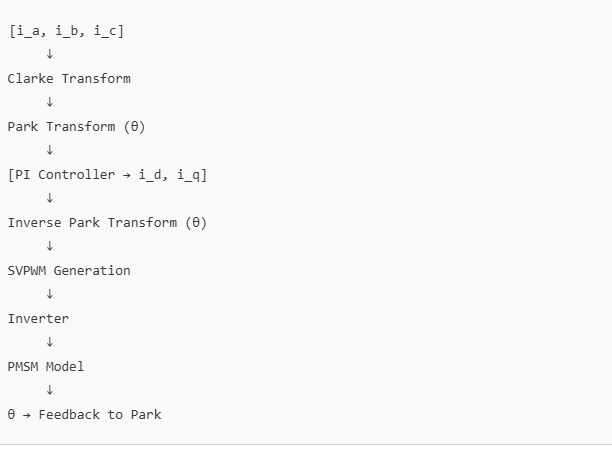
직접 돌리기 전에, 가상으로 돌려보자!🧠 왜 시뮬레이션이 중요한가요?FOC(Field-Oriented Control)는 수식과 벡터 기반 제어이기 때문에,수치 해석 기반 시뮬레이션을 먼저 해보는 것이 실제 구현보다 훨씬 안전하고 효율적입니다.이점설명💥 하드웨어 리스크 ↓과전류·불안정한 회전 없이 사전 확인 가능🧪 파라미터 튜닝PID, MTPA, 속도 응답성 확인🔍 내부 전류·자속 분석실시간 전류 벡터, 토크, 회전속도 가시화🧭 센서리스 실험도 가능추정된 위치 vs 실제 위치 비교 검증📁 시뮬레이션 구성 요소 (기본 블록)블록기능Motor Model (PMSM/IPMSM)모터의 전기적, 기계적 특성 모델링Clarke / Park Transform전류 변환PI Controller (id, iq)전..